DMC-4080功能配置 (1)通訊配置 以太網(wǎng)是局域網(wǎng),信息以數(shù)據(jù)包為單位進(jìn)行傳輸。DMC-4080支持兩種工業(yè)標(biāo)準(zhǔn)協(xié)議:TCP/IP和UDP/IP。控制器以所接收的協(xié)議格式進(jìn)行相應(yīng)的回應(yīng)。 TCP/IP是一個(gè)“連接”協(xié)議。主站或客戶端連接到從站或服務(wù)器,通過(guò)一系列數(shù)據(jù)包握手以便開(kāi)始通訊。每個(gè)發(fā)送的數(shù)據(jù)包當(dāng)被接受時(shí)會(huì)告知已收到。如果沒(méi)有接受到告知回應(yīng),此信息被認(rèn)為丟失,會(huì)被自動(dòng)重發(fā)。 UDP/IP不需要“連接”。如果信息丟失,控制器不返回冒號(hào)或問(wèn)號(hào)。由于此協(xié)議本身不提供關(guān)于丟失數(shù)據(jù)的保護(hù),因此,發(fā)送方必須自己重發(fā)數(shù)據(jù)包。UDP/IP有較少的開(kāi)銷,帶來(lái)更高的吞吐量,用UDP連接,不必重新連接到控制器。 DH指令控制DMC-4080使用動(dòng)態(tài)地址或靜態(tài)地址,如果控制器被設(shè)置為DH1(默認(rèn)),且網(wǎng)絡(luò)中有一個(gè)DHCP服務(wù)器,控制器將被從服務(wù)器自動(dòng)分配一個(gè)IP地址。如果設(shè)置為DHO,會(huì)阻止從服務(wù)器分配地址給控制器。DMC-4080允許用戶直接指定控制器的地址,控制器本身提供IA指令用于輸入要分配的IP地址。IA指令只有在DH設(shè)置為0時(shí)有效。 盡管UDP/IP協(xié)議的數(shù)據(jù)傳輸效率高、應(yīng)用也更簡(jiǎn)單,但TCP/IP協(xié)議可以保證通訊更為可靠。因此本文使用TCP/IP協(xié)議,DH設(shè)置為0并用IA192,168,0,100給控制器分配靜態(tài)地址192,168,0,100 0 (2)脈沖指令輸出配置
控制器為每軸提供脈沖/方向信號(hào)(STP+, STP-, DIR+, DIR-)輸出,這些輸出一般用于連接外部驅(qū)動(dòng)器,控制步進(jìn)電機(jī)或工作在位置模式下的伺服電機(jī)。絕大部分電機(jī)驅(qū)動(dòng)器均可接收脈沖/方向信號(hào),對(duì)于這樣的驅(qū)動(dòng)器,只需使用屏蔽雙絞線將控制器與電機(jī)驅(qū)動(dòng)器上的STP+, STP-, DIR+, DIR一對(duì)應(yīng)連接即可。DMC-4080提供MT命令用于選擇電機(jī)類型及驅(qū)動(dòng)信號(hào)的極性。本文用MT1,1,1,1,1指令指定各軸電機(jī)為正極性伺服電機(jī)。
(3)放大器使能配置
DMC-4080提供電機(jī)放大器的使能控制器信號(hào)-AEN,使能信號(hào)在以下條件下改變:
·發(fā)送了電機(jī)關(guān)斷指令MO或看門(mén)狗定時(shí)器啟動(dòng)
" OE指令(錯(cuò)誤報(bào)警關(guān)斷使能)被設(shè)置,位置誤差超過(guò)了誤差極限(通過(guò)ER設(shè)置)
·到達(dá)限位開(kāi)關(guān)
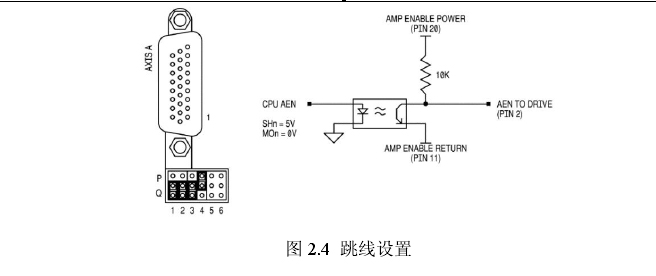
DMC-4080提供的放大器使能方式有:高電平放大器使能(HAEN、低電平放大器使能(LAEN ) , 5 V邏輯、 12V邏輯、24V的外部電源等。每軸放大器使能電路可通過(guò)跳線分別設(shè)置的,每個(gè)不同配置的跳線設(shè)置和電路圖如圖2.4所不。
本文通過(guò)如圖2.4所示的跳線,設(shè)置各軸放大器使能為外部電源、低電平放大器使能。DMC-4080提供SH, MO指令用來(lái)控制使能信號(hào)的輸出,MO關(guān)斷放大器使能、SH使放大器使能。放大器一旦使能,就可發(fā)送Galil指令控制電機(jī)運(yùn)動(dòng)。 (4)編碼器信號(hào)輸入配置 主編碼器輸入可配置為正交(默認(rèn))或脈沖/方向輸入。標(biāo)為MA+, MA-,MB+, MB-,負(fù)輸入(MA-, MB-)是編碼器輸入的差分輸入。當(dāng)編碼器設(shè)置為脈沖/方向輸入,MA通道則是脈沖輸入,MB通道是方向輸入。 DMC-4080提供CE指令用于配置接收編碼器類型。本文通過(guò)CES指令將接收編碼器類型配置為脈沖+方向型。 2. 3. 2 DMC-4080運(yùn)動(dòng)控制功能分析 DMC-4080提供了多種運(yùn)動(dòng)方式,包括JOG運(yùn)動(dòng)、獨(dú)立定位、位置跟蹤、含角度跟蹤的平面矢量插補(bǔ)、軌跡方式、多維直線插補(bǔ)運(yùn)動(dòng)。本節(jié)將對(duì)這些運(yùn)動(dòng)控制方式及其功能進(jìn)行分析比較,并選擇滿足本系統(tǒng)五軸聯(lián)動(dòng)控制功能的運(yùn)動(dòng)控制功能。 (1)JOG運(yùn)動(dòng) 該運(yùn)動(dòng)功能為單步運(yùn)動(dòng)(點(diǎn)動(dòng)方式),在該運(yùn)方式下,能夠根據(jù)需要指定運(yùn)動(dòng)的速度、加速度和方向。該運(yùn)動(dòng)方式通過(guò)速度控制,沒(méi)有定位要求,以ST指令停止運(yùn)動(dòng)。只需對(duì)各軸指定JOG速度、加速度和減速度,對(duì)應(yīng)軸就會(huì)以此速度一直運(yùn)動(dòng)直到有停止命令ST使其停止,運(yùn)動(dòng)方向由速度參數(shù)的符號(hào)決定。 (2)獨(dú)立定位 獨(dú)立定位包括絕對(duì)位置運(yùn)動(dòng)和相對(duì)位置運(yùn)動(dòng),絕對(duì)位置運(yùn)動(dòng)給定的是各軸坐標(biāo)點(diǎn),相對(duì)位置運(yùn)動(dòng)給定的是各軸的增量距離。兩種獨(dú)立定位運(yùn)動(dòng)中各軸的絕對(duì)位置或相對(duì)位置、速度、加速度、減速度相互獨(dú)立互不影響,各軸按照程序中所規(guī)定的運(yùn)動(dòng)軌跡完成各自的定位控制。 (3)位置跟蹤 對(duì)于一些應(yīng)用如衛(wèi)星跟蹤、導(dǎo)彈跟蹤、鏡子或透鏡的隨機(jī)打磨或需要在未完成運(yùn)動(dòng)時(shí)改變終點(diǎn)的任何應(yīng)用都需要跟蹤一個(gè)目標(biāo)位置,控制器必須朝著目標(biāo)行進(jìn),并能在運(yùn)動(dòng)中改變目標(biāo)位置。在跟蹤應(yīng)用中,目標(biāo)位置改變可發(fā)生在運(yùn)動(dòng)中的任意時(shí)間,或以有規(guī)律的預(yù)定的時(shí)間間隔o DMC-4080控制器用位置跟蹤模式支持此類型運(yùn)動(dòng),此模式允許在運(yùn)動(dòng)過(guò)程中有計(jì)劃的或隨機(jī)的更新當(dāng)前絕對(duì)目標(biāo)位置。根據(jù)新目標(biāo)位置,控制器繼續(xù)朝其運(yùn)動(dòng)方向繼續(xù)運(yùn)行,或改變運(yùn)動(dòng)方向,或減速停止。給出的新目標(biāo)位置可與當(dāng)前目標(biāo)位置為同一方向,或與當(dāng)前目標(biāo)位置為相反方向。控制器會(huì)根據(jù)新目標(biāo)位置、已設(shè)置的加速度、加速度和速度來(lái)計(jì)算生成新運(yùn)動(dòng)軌跡。 (4)含角度跟蹤的平面矢量插補(bǔ) 對(duì)于雕刻、給縫之類由圓弧和線段組成的二維運(yùn)動(dòng),可以使用DMC-4080控制器的含角度跟蹤的平面矢量插補(bǔ)功能完成上述運(yùn)動(dòng),在直線和圓弧的連接處,也是以矢量插補(bǔ)的方式進(jìn)行。DMC-4080執(zhí)行含角度跟蹤的平面矢量插補(bǔ)的同時(shí),PC機(jī)軟件部分可以執(zhí)行其他任務(wù)。含角度跟蹤的平面矢量插補(bǔ)運(yùn)動(dòng)功能,可以選擇任意兩個(gè)軸構(gòu)成平面矢量插補(bǔ)運(yùn)動(dòng),且在任何時(shí)候,只能為聯(lián)動(dòng)軸指定任意兩個(gè)軸構(gòu)成二維矢量運(yùn)動(dòng)。 此外,也能對(duì)第三軸進(jìn)行控制。如玻璃切割、石材切割,這類應(yīng)用需要刀片軸的角度與加工軌跡保持相切,為此,DMC-4080控制器使刀片軸(第三軸)做為角度跟隨軸,使其與選擇的兩軸運(yùn)動(dòng)保持角度跟隨關(guān)系。 (5)軌跡方式 DMC-4080控制器提供軌跡模式,此模式能夠在1-8軸內(nèi)定義任意位置一時(shí)間曲線,從而跟蹤由計(jì)算機(jī)產(chǎn)生的軌跡如拋物線、螺旋線或其他形式的軌跡。此功能對(duì)軌跡類別無(wú)限制,軌跡長(zhǎng)度無(wú)限。其軌跡用位置增量加以描述,用指令CD指定位置增量,DT指定時(shí)間間隔。控制器在指定的位置增量之間進(jìn)行直線插補(bǔ),并且每個(gè)采樣周期內(nèi)給出一個(gè)坐標(biāo)點(diǎn)。對(duì)于DMC-4080默認(rèn)的TM1000,采樣周期為lms,即在DT定義的時(shí)間間隔內(nèi)每隔lms產(chǎn)生一個(gè)插補(bǔ)點(diǎn)。 C6)多維直線插補(bǔ) DMC-4080控制器提供2軸到8軸多維直線插補(bǔ)功能。在該運(yùn)動(dòng)控制方式下,各軸按給定的目標(biāo)軌跡以矢量速度、矢量加速度或矢量減速度聯(lián)動(dòng);并根據(jù)各軸的增量位移生成運(yùn)動(dòng)軌跡。在連續(xù)的多維直線插補(bǔ)運(yùn)動(dòng)中,可以給定無(wú)數(shù)的增量位移,以便多維直線插補(bǔ)方式完全跟隨給定的目標(biāo)軌跡。DMC-4080提供LM指令用于指定插補(bǔ)軸,指令LI來(lái)指定各軸的增量運(yùn)動(dòng)距離,使用多維直線插補(bǔ)結(jié)束指令LE來(lái)指定多維直線插補(bǔ)運(yùn)動(dòng)程序結(jié)束,此指令告訴控制器減速停止在最后一條LI指令之后。 本文要實(shí)現(xiàn)的加工方式為空間三維加工,要求的運(yùn)動(dòng)方式為五軸聯(lián)動(dòng)。上述運(yùn)動(dòng)控制方式中:JOG運(yùn)動(dòng)方式給定速度和方向并不能指定加工位置,且各軸之間不能實(shí)現(xiàn)聯(lián)動(dòng);獨(dú)立定位方式中各軸的位置、速度、加速度、減速度相互獨(dú)立互不相關(guān),不能形成聯(lián)動(dòng);位置跟蹤方式跟蹤的是絕對(duì)目標(biāo)位置,屬于絕對(duì)定位模式亦不能形成聯(lián)動(dòng);含角度跟蹤的平面矢量插補(bǔ)方式其功能被限制在平面上的二維加工,且最多三軸聯(lián)動(dòng);軌跡方式其實(shí)質(zhì)是直線插補(bǔ)運(yùn)動(dòng),在指定位置增量的同時(shí)需指定時(shí)間間隔;多維直線插補(bǔ)方式提供多達(dá)八軸的聯(lián)動(dòng),指定聯(lián)動(dòng)軸,給定增量距離、矢量速度、矢量加速度、矢量減速度各軸既能沿規(guī)定的軌跡聯(lián)動(dòng)。綜上,選取多維直線插補(bǔ)為本系統(tǒng)的五軸聯(lián)動(dòng)控制方式。


 首頁(yè)
首頁(yè)
 產(chǎn)品中心
產(chǎn)品中心
 電話咨詢
電話咨詢
 售后服務(wù)
售后服務(wù) 售前服務(wù)
售前服務(wù) 關(guān)注公眾號(hào)
關(guān)注公眾號(hào)