

 五軸石材橋切機數控系統的研究內容
五軸石材橋切機數控系統的研究內容
 國內外五軸石材橋切機發展
國內外五軸石材橋切機發展
 國內外五軸數控加工設備發展
國內外五軸數控加工設備發展
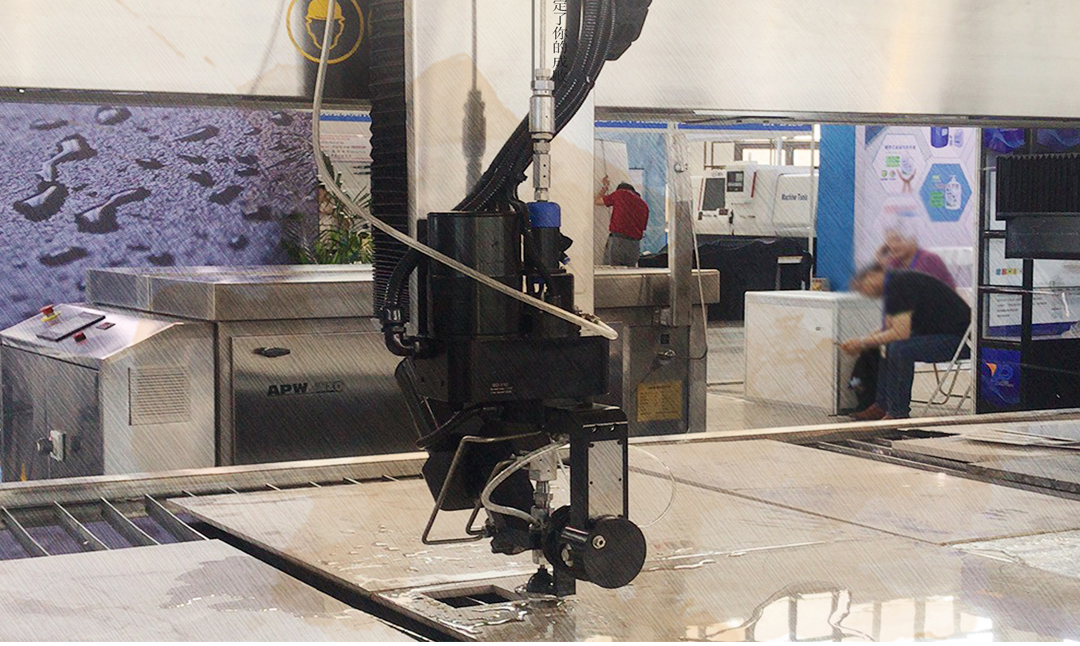
 五軸數控加工設備的分類與特點
五軸數控加工設備的分類與特點
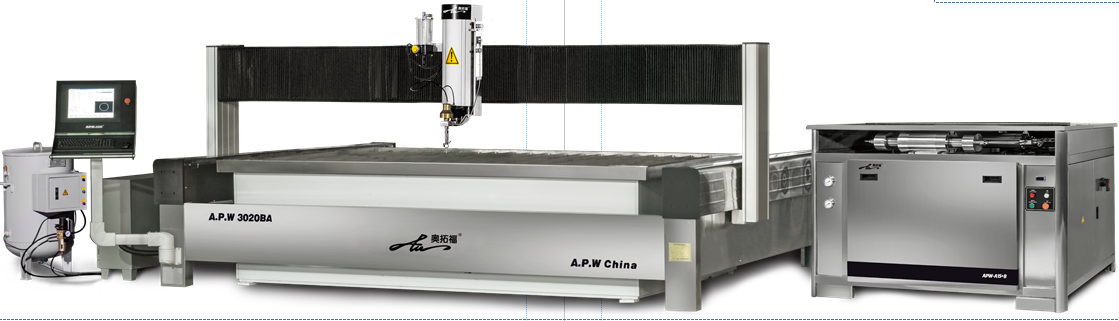
 五軸數控加工設備概述
五軸數控加工設備概述
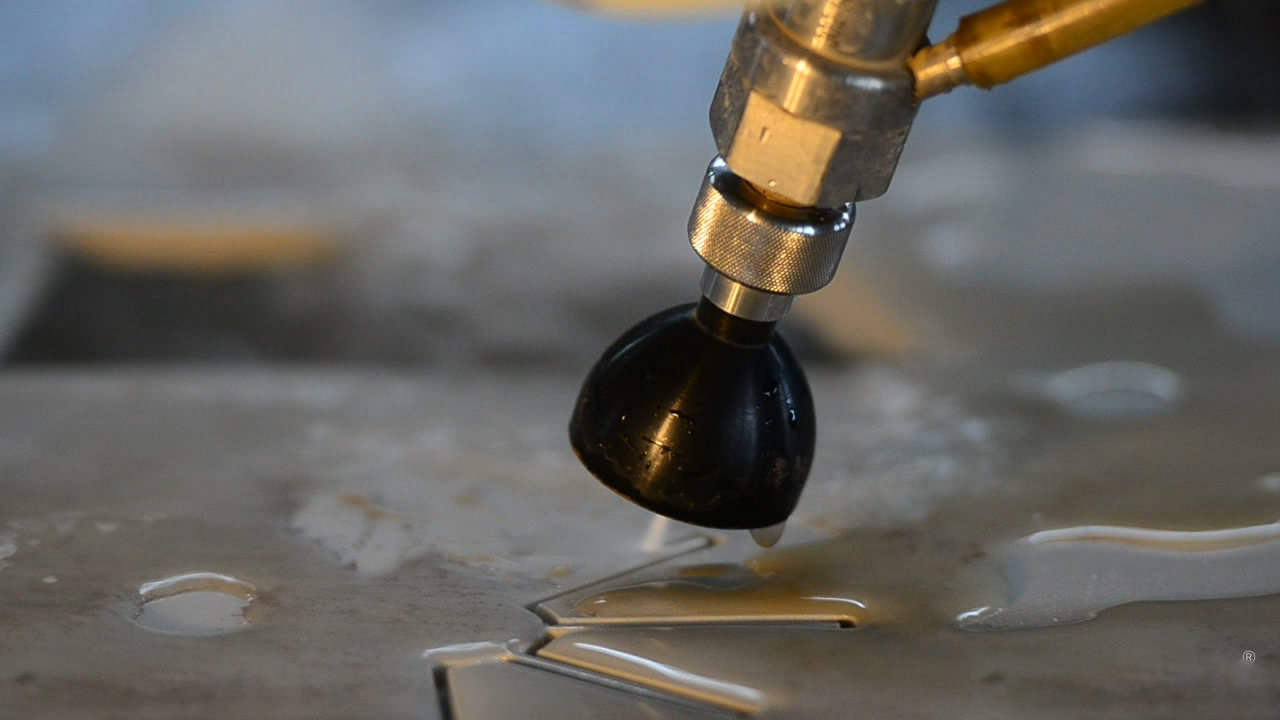
 五軸聯動石材水刀切割專用數控系統的實驗驗證
五軸聯動石材水刀切割專用數控系統的實驗驗證
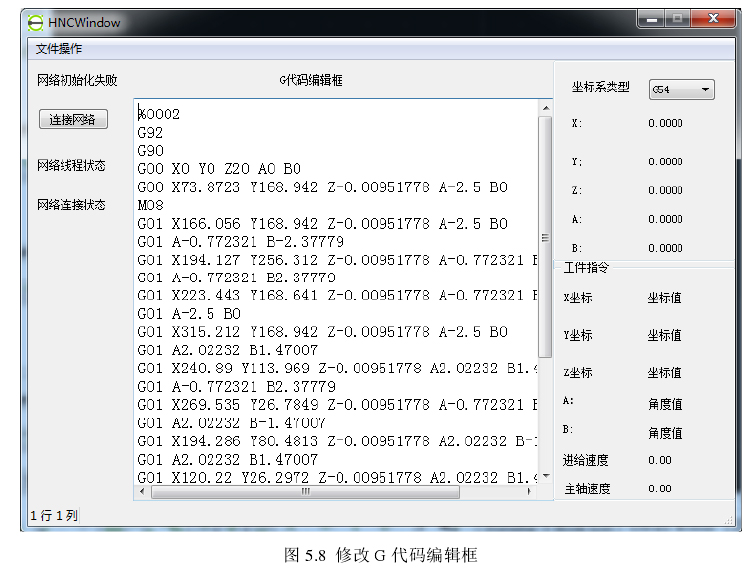 將生成的五軸數控代碼發送到下位機
將生成的五軸數控代碼發送到下位機
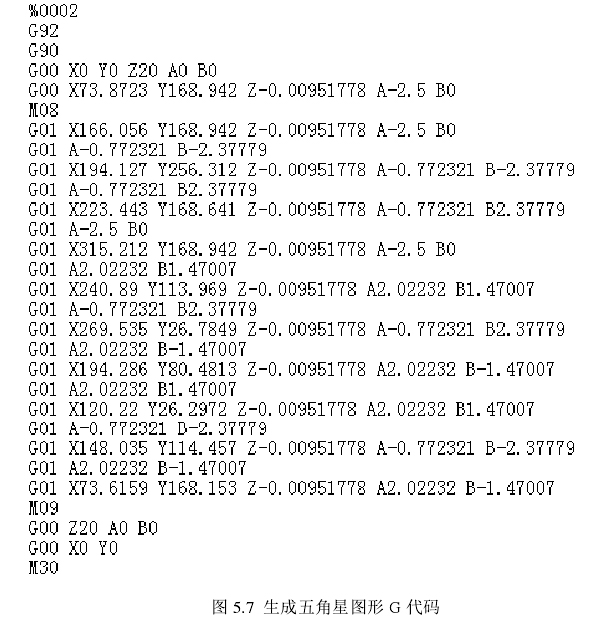 生成五軸數控代碼操作
生成五軸數控代碼操作
 首頁
首頁
 產品中心
產品中心
 電話咨詢
電話咨詢

 售后服務
售后服務 售前服務
售前服務 關注公眾號
關注公眾號