

1. 破拆機器人組成
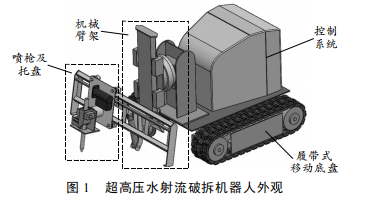
超高壓水射流破拆機器人履帶式移動底盤控制系統、機械臂架和噴槍及托盤4部分組成。
(1)履帶式移動底盤
履帶式移動底盤是機器人執行工作的載體,采用液壓驅動,具有良好的穩定性和動力輸出,是進行破拆工作的可靠保障,履帶式移動底盤由液壓驅動馬達、減震機構、履帶輪、履帶和底盤架等部件構成。
(2)控制系統
控制系統是破拆機器人的大腦,通過PLC控制器、壓力傳感器等硬件設備對機器人的移動以及破拆過程進行實時控制。
(3)機械臂架
機械臂架是噴槍托盤的搭載平臺,包括2個移動和2個轉動一共4個空間自由度,其不僅能為噴槍托盤提供一定的移動空間,而且能夠調整噴槍托盤移動方位,擴大混凝土破拆范圍,實現不同方向的破拆。
(4)噴槍托盤
噴槍托盤是混凝土破拆的執行機構,超高壓泵將液體水增加后通過噴槍噴射在混凝土上,超高壓立柱狀水可以將混凝土破開,通過內部擠壓最后將其破碎。由于破碎時噴槍收到的反作用力過大,同時要進行往復擺動以提高破碎效果,因此噴槍采用了特殊設計的夾持機構進行固定,并由安裝在托盤上的液壓馬達通過曲柄連桿機構帶動其進行往復擺動,實現破拆動作。
機械臂架驅動機構建模
機械臂架工作原理
超高壓水射流破拆機器人機械臂架的液壓驅動原理
液壓動力站1由電機帶動定量泵為系統提供液壓動力,溢流閥2控制系統的最大工作壓力,總控制閥3控制系統的工作狀態。支架翻轉機構4調控托盤的水平方位,控制噴槍入射角,提高混凝土的破拆效果。臂架擺動機構驅動6通過對馬達的控制,帶動噴槍頭左右擺動,擴大破拆范圍。托盤驅動12由雙向定量馬達帶動,通過齒輪齒條機構,控制托盤在支架上往復運動。
AMEsim在工程上的建模和仿真涉及學科多且領域廣,利用AMEsim所包含的信號元件庫、機械元件庫和液壓元件庫3種模型庫,結合液壓驅動原理以及破拆機器人實際機械結構,建立了機械臂架AMEsim仿真模型。仿真模型參數設置,液壓泵的排量設置為18.7ml/r。采用額定轉速為1500r/min,功率為7.8kw電動機帶動。根據實際設計計算,系統工作壓力采用16MPa,因此溢流閥壓力設置為16MPa,各種換向閥選用的是電液比例換向閥,利用信號元件控制,并省略了總控制閥。模型中的各三位四通閥信號輸入范圍-1~1,0表示中位。二位四通信號范圍為0~1.為簡化仿真輸入信號均取整數。
系統仿真分析
超高壓水射流破拆機器人可以實現多角度的混凝土建筑物進行破拆,而運用較多的是對水平方向混凝土路面進行破拆,選取該工作狀態對機器人機械臂架以及托盤運動進行仿真,具有相對高的參考價值,路面破拆時噴槍與路面豎直方向夾角0°~10°
總結:運用多學科多領域相互融合的建模仿真軟件AMEsim,建立了超高壓水射流破拆機器人的部分液壓系統模型,通過該軟件對破拆機器人工作時機械臂架和噴槍托盤的運動進行了模擬,模擬結果顯示,所設置的參數均能控制機器人部件以預期的速度達到預定位置,通過仿真得到了破拆時系統溢流閥的流量變化曲線,相關參數設定,對設備今后的研制提供重要參考。
 首頁
首頁
 產品中心
產品中心
 電話咨詢
電話咨詢
 售后服務
售后服務 售前服務
售前服務 關注公眾號
關注公眾號